介紹如何在 ITK 的多層級(multi-resolution)影像對準架構下,進行線性仿射影像對準(affine registration)。
以下是使用多層級影像對準架構,進行線性仿射影像對準的 C++ 範例。
#include <itkAffineTransform.h> #include <itkCenteredTransformInitializer.h> #include <itkMultiResolutionImageRegistrationMethod.h> #include <itkMattesMutualInformationImageToImageMetric.h> #include <itkRegularStepGradientDescentOptimizer.h> #include <itkRecursiveMultiResolutionPyramidImageFilter.h> #include <itkImage.h> #include <itkImageFileReader.h> #include <itkImageFileWriter.h> #include <itkResampleImageFilter.h> #include <itkCastImageFilter.h> #include <itkCheckerBoardImageFilter.h> #include <itkCommand.h> // 定義與實作觀察影像對準過程的 Observer class CommandIterationUpdate : public itk::Command { public: using Self = CommandIterationUpdate; using Superclass = itk::Command; using Pointer = itk::SmartPointer<Self>; itkNewMacro(Self); protected: CommandIterationUpdate() = default; public: using OptimizerType = itk::RegularStepGradientDescentOptimizer; using OptimizerPointer = const OptimizerType *; void Execute(itk::Object * caller, const itk::EventObject & event) override { Execute((const itk::Object *)caller, event); } void Execute(const itk::Object * object, const itk::EventObject & event) override { auto optimizer = static_cast<OptimizerPointer>(object); if (!(itk::IterationEvent().CheckEvent(&event))) { return; } std::cout << std::fixed; std::cout << optimizer->GetCurrentIteration() << " "; std::cout << optimizer->GetValue() << " "; std::cout << optimizer->GetCurrentPosition() << " " << m_CumulativeIterationIndex++ << std::endl; } private: unsigned int m_CumulativeIterationIndex{ 0 }; }; // 定義與實作在解析度變動時控制影像對準參數的 Observer template <typename TRegistration> class RegistrationInterfaceCommand : public itk::Command { public: using Self = RegistrationInterfaceCommand; using Superclass = itk::Command; using Pointer = itk::SmartPointer<Self>; itkNewMacro(Self); protected: RegistrationInterfaceCommand() = default; public: using RegistrationType = TRegistration; using RegistrationPointer = RegistrationType *; using OptimizerType = itk::RegularStepGradientDescentOptimizer; using OptimizerPointer = OptimizerType *; void Execute(itk::Object * object, const itk::EventObject & event) override { if (!(itk::IterationEvent().CheckEvent(&event))) { return; } auto registration = static_cast<RegistrationPointer>(object); auto optimizer = static_cast<OptimizerPointer>(registration->GetModifiableOptimizer()); std::cout << "-------------------------------------" << std::endl; std::cout << "MultiResolution Level : " << registration->GetCurrentLevel() << std::endl; std::cout << std::endl; // 自訂步長規則 if (registration->GetCurrentLevel() == 0) { optimizer->SetMaximumStepLength(16.00); optimizer->SetMinimumStepLength(0.01); } else { optimizer->SetMaximumStepLength(optimizer->GetMaximumStepLength() / 4.0); optimizer->SetMinimumStepLength(optimizer->GetMinimumStepLength() / 10.0); } } void Execute(const itk::Object *, const itk::EventObject &) override { return; } }; int main(int argc, char * argv[]) { if (argc < 4) { std::cerr << "Missing Parameters " << std::endl; std::cerr << "Usage: " << argv[0]; std::cerr << " fixedImageFile movingImageFile outputImagefile"; std::cerr << " [checkerboardbefore] [CheckerBoardAfter]"; return EXIT_FAILURE; } // 影像維度 constexpr unsigned int Dimension = 2; // 影像像素資料型態 using PixelType = float; // 影像型態 using ImageType = itk::Image<PixelType, Dimension>; // 設定影像轉換類型為線性的 AffineTransform(參數型態可為 float 或 double) using TransformType = itk::AffineTransform<double, Dimension>; // Optimizer using OptimizerType = itk::RegularStepGradientDescentOptimizer; // 使用線性內插 using InterpolatorType = itk::LinearInterpolateImageFunction<ImageType, double>; // Metric using MetricType = itk::MattesMutualInformationImageToImageMetric<ImageType, ImageType>; using OptimizerScalesType = OptimizerType::ScalesType; // 多層級影像對準 using RegistrationType = itk::MultiResolutionImageRegistrationMethod<ImageType, ImageType>; // 建立 Optimizer、Interpolator、Registration、Metric、Transform 物件 OptimizerType::Pointer optimizer = OptimizerType::New(); InterpolatorType::Pointer interpolator = InterpolatorType::New(); RegistrationType::Pointer registration = RegistrationType::New(); MetricType::Pointer metric = MetricType::New(); TransformType::Pointer transform = TransformType::New(); registration->SetOptimizer(optimizer); registration->SetInterpolator(interpolator); registration->SetMetric(metric); registration->SetTransform(transform); // 讀取影像 using FixedImageReaderType = itk::ImageFileReader<ImageType>; using MovingImageReaderType = itk::ImageFileReader<ImageType>; FixedImageReaderType::Pointer fixedImageReader = FixedImageReaderType::New(); MovingImageReaderType::Pointer movingImageReader = MovingImageReaderType::New(); fixedImageReader->SetFileName(argv[1]); // 讀取固定影像 movingImageReader->SetFileName(argv[2]); // 讀取調動影像 // 設定影像來源 registration->SetFixedImage(fixedImageReader->GetOutput()); registration->SetMovingImage(movingImageReader->GetOutput()); fixedImageReader->Update(); // 設定固定影像作用範圍 registration->SetFixedImageRegion( fixedImageReader->GetOutput()->GetBufferedRegion()); // 使用 CenteredTransformInitializer 初始化轉換參數 using TransformInitializerType = itk::CenteredTransformInitializer<TransformType, ImageType, ImageType>; TransformInitializerType::Pointer initializer = TransformInitializerType::New(); initializer->SetTransform(transform); initializer->SetFixedImage(fixedImageReader->GetOutput()); initializer->SetMovingImage(movingImageReader->GetOutput()); initializer->MomentsOn(); initializer->InitializeTransform(); registration->SetInitialTransformParameters(transform->GetParameters()); // 設定各參數尺度,前 NxN 個參數為線性轉換矩陣,後 N 個參數為平移轉換參數 OptimizerScalesType optimizerScales(transform->GetNumberOfParameters()); optimizerScales[0] = 1.0; // 線性轉換矩陣 M11 optimizerScales[1] = 1.0; // 線性轉換矩陣 M12 optimizerScales[2] = 1.0; // 線性轉換矩陣 M21 optimizerScales[3] = 1.0; // 線性轉換矩陣 M22 optimizerScales[4] = 1.0 / 1e7; // 平移轉換參數 X optimizerScales[5] = 1.0 / 1e7; // 平移轉換參數 Y optimizer->SetScales(optimizerScales); // MattesMutualInformationImageToImageMetric 相關參數 metric->SetNumberOfHistogramBins(128); metric->SetNumberOfSpatialSamples(50000); // 設定隨機取樣用亂數種子 metric->ReinitializeSeed(76926294); // 設定 ExplicitPDFDerivatives // UseExplicitPDFDerivatives = True // 計算速度快,耗費記憶體,適用於參數量較少的狀況,例如剛性轉換 // UseExplicitPDFDerivatives = False // 計算速度慢,節省記憶體,適用於參數量較少的狀況,例如 BSpline 轉換 metric->SetUseExplicitPDFDerivatives(true); // 設定疊代次數上限與 Relaxation Factor optimizer->SetNumberOfIterations(200); optimizer->SetRelaxationFactor(0.8); // 設定觀察影像對準過程的 Observer CommandIterationUpdate::Pointer observer = CommandIterationUpdate::New(); optimizer->AddObserver(itk::IterationEvent(), observer); // 設定在解析度變動時控制影像對準參數的 Observer using CommandType = RegistrationInterfaceCommand<RegistrationType>; CommandType::Pointer command = CommandType::New(); registration->AddObserver(itk::IterationEvent(), command); // 設定層級數 registration->SetNumberOfLevels(3); // 進行影像對準 try { registration->Update(); std::cout << "Optimizer stop condition: " << registration->GetOptimizer()->GetStopConditionDescription() << std::endl; } catch (itk::ExceptionObject & err) { std::cerr << "ExceptionObject caught !" << std::endl; std::cerr << err << std::endl; return EXIT_FAILURE; } std::cout << "Optimizer Stopping Condition = " << optimizer->GetStopCondition() << std::endl; using ParametersType = RegistrationType::ParametersType; ParametersType finalParameters = registration->GetLastTransformParameters(); double MatrixValue11 = finalParameters[0]; double MatrixValue12 = finalParameters[1]; double MatrixValue21 = finalParameters[2]; double MatrixValue22 = finalParameters[3]; double TranslationAlongX = finalParameters[4]; double TranslationAlongY = finalParameters[5]; unsigned int numberOfIterations = optimizer->GetCurrentIteration(); double bestValue = optimizer->GetValue(); // 輸出影像對準結果 std::cout << std::fixed; std::cout << "Result = " << std::endl; std::cout << " Translation X = " << TranslationAlongX << std::endl; std::cout << " Translation Y = " << TranslationAlongY << std::endl; std::cout << " Matrix = " << MatrixValue11 << " " << MatrixValue12 << std::endl; std::cout << " " << MatrixValue21 << " " << MatrixValue22 << std::endl; std::cout << " Iterations = " << numberOfIterations << std::endl; std::cout << " Metric value = " << bestValue << std::endl; // 建立 ResampleFilter 套用影像轉換 using ResampleFilterType = itk::ResampleImageFilter<ImageType, ImageType>; TransformType::Pointer finalTransform = TransformType::New(); finalTransform->SetParameters(finalParameters); finalTransform->SetFixedParameters(transform->GetFixedParameters()); ResampleFilterType::Pointer resample = ResampleFilterType::New(); resample->SetTransform(finalTransform); resample->SetInput(movingImageReader->GetOutput()); ImageType::Pointer fixedImage = fixedImageReader->GetOutput(); // 預設背景像素值 PixelType backgroundGrayLevel = 100; resample->SetSize(fixedImage->GetLargestPossibleRegion().GetSize()); resample->SetOutputOrigin(fixedImage->GetOrigin()); resample->SetOutputSpacing(fixedImage->GetSpacing()); resample->SetOutputDirection(fixedImage->GetDirection()); resample->SetDefaultPixelValue(backgroundGrayLevel); // 輸出影像類型 using OutputPixelType = unsigned char; using OutputImageType = itk::Image<OutputPixelType, Dimension>; // 影像轉型 CastImageFilter using CastFilterType = itk::CastImageFilter<ImageType, OutputImageType>; using WriterType = itk::ImageFileWriter<OutputImageType>; WriterType::Pointer writer = WriterType::New(); CastFilterType::Pointer caster = CastFilterType::New(); // 設定出檔案 writer->SetFileName(argv[3]); caster->SetInput(resample->GetOutput()); writer->SetInput(caster->GetOutput()); writer->Update(); // 產生棋盤式影像比較圖 using CheckerBoardFilterType = itk::CheckerBoardImageFilter<ImageType>; CheckerBoardFilterType::Pointer checker = CheckerBoardFilterType::New(); checker->SetInput1(fixedImage); checker->SetInput2(resample->GetOutput()); caster->SetInput(checker->GetOutput()); writer->SetInput(caster->GetOutput()); resample->SetDefaultPixelValue(0); // 輸出影像對準前的棋盤式影像比較圖 TransformType::Pointer identityTransform = TransformType::New(); identityTransform->SetIdentity(); resample->SetTransform(identityTransform); if (argc > 4) { writer->SetFileName(argv[4]); writer->Update(); } // 輸出影像對準後的棋盤式影像比較圖 resample->SetTransform(finalTransform); if (argc > 5) { writer->SetFileName(argv[5]); writer->Update(); } return EXIT_SUCCESS; }
將這個 C++ 程式儲存為 MultiResReg.cxx 之後,搭配以下 CMakeLists.txt 設定檔以 CMake 編譯。
cmake_minimum_required(VERSION 3.10.2) # 設定專案名稱 project(MultiResReg) # 尋找並引入 ITK 函式庫 find_package(ITK REQUIRED) include(${ITK_USE_FILE}) # 增加一個執行檔 add_executable(MultiResReg MultiResReg.cxx) # 定義執行檔連結方式 target_link_libraries(MultiResReg ${ITK_LIBRARIES})
編譯以執行的指令如下:
# 編譯程式 mkdir build cd build cmake .. # 執行程式 ./MultiResReg BrainT1SliceBorder20.png \ BrainProtonDensitySliceShifted13x17y.png \ output.png checkerboard1.png checkerboard2.png
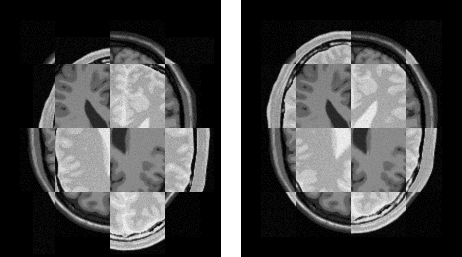
這裡的 BrainT1SliceBorder20.png 與 BrainProtonDensitySliceShifted13x17y.png 圖檔可以從 ITK 的 GitHub 網站取得,執行後除了可以產生對準後的圖形之外,也可以產生影像對準前後的棋盤式影像比較圖。
3D 版的線性影像對準基本上跟 2D 版本幾乎相同,只是更改影像維度而已,另外稍微修改一下參數尺度。
#include <itkAffineTransform.h> #include <itkCenteredTransformInitializer.h> #include <itkMultiResolutionImageRegistrationMethod.h> #include <itkMattesMutualInformationImageToImageMetric.h> #include <itkRegularStepGradientDescentOptimizer.h> #include <itkRecursiveMultiResolutionPyramidImageFilter.h> #include <itkImage.h> #include <itkImageFileReader.h> #include <itkImageFileWriter.h> #include <itkResampleImageFilter.h> #include <itkCastImageFilter.h> #include <itkCheckerBoardImageFilter.h> #include <itkCommand.h> // 定義與實作觀察影像對準過程的 Observer class CommandIterationUpdate : public itk::Command { public: using Self = CommandIterationUpdate; using Superclass = itk::Command; using Pointer = itk::SmartPointer<Self>; itkNewMacro(Self); protected: CommandIterationUpdate() = default; public: using OptimizerType = itk::RegularStepGradientDescentOptimizer; using OptimizerPointer = const OptimizerType *; void Execute(itk::Object * caller, const itk::EventObject & event) override { Execute((const itk::Object *)caller, event); } void Execute(const itk::Object * object, const itk::EventObject & event) override { auto optimizer = static_cast<OptimizerPointer>(object); if (!(itk::IterationEvent().CheckEvent(&event))) { return; } std::cout << std::fixed; std::cout << optimizer->GetCurrentIteration() << " "; std::cout << optimizer->GetValue() << " "; std::cout << optimizer->GetCurrentPosition() << " " << m_CumulativeIterationIndex++ << std::endl; } private: unsigned int m_CumulativeIterationIndex{ 0 }; }; // 定義與實作在解析度變動時控制影像對準參數的 Observer template <typename TRegistration> class RegistrationInterfaceCommand : public itk::Command { public: using Self = RegistrationInterfaceCommand; using Superclass = itk::Command; using Pointer = itk::SmartPointer<Self>; itkNewMacro(Self); protected: RegistrationInterfaceCommand() = default; public: using RegistrationType = TRegistration; using RegistrationPointer = RegistrationType *; using OptimizerType = itk::RegularStepGradientDescentOptimizer; using OptimizerPointer = OptimizerType *; void Execute(itk::Object * object, const itk::EventObject & event) override { if (!(itk::IterationEvent().CheckEvent(&event))) { return; } auto registration = static_cast<RegistrationPointer>(object); auto optimizer = static_cast<OptimizerPointer>(registration->GetModifiableOptimizer()); std::cout << "-------------------------------------" << std::endl; std::cout << "MultiResolution Level : " << registration->GetCurrentLevel() << std::endl; std::cout << std::endl; // 自訂步長規則 if (registration->GetCurrentLevel() == 0) { optimizer->SetMaximumStepLength(32.00); optimizer->SetMinimumStepLength(0.01); } else { optimizer->SetMaximumStepLength(optimizer->GetMaximumStepLength() / 4.0); optimizer->SetMinimumStepLength(optimizer->GetMinimumStepLength() / 10.0); } } void Execute(const itk::Object *, const itk::EventObject &) override { return; } }; int main(int argc, char * argv[]) { if (argc < 4) { std::cerr << "Missing Parameters " << std::endl; std::cerr << "Usage: " << argv[0]; std::cerr << " fixedImageFile movingImageFile outputImagefile"; std::cerr << " [checkerboardbefore] [CheckerBoardAfter]"; return EXIT_FAILURE; } // 影像維度 constexpr unsigned int Dimension = 3; // 影像像素資料型態 using PixelType = float; // 影像型態 using ImageType = itk::Image<PixelType, Dimension>; // 設定影像轉換類型為線性的 AffineTransform(參數型態可為 float 或 double) using TransformType = itk::AffineTransform<double, Dimension>; // Optimizer using OptimizerType = itk::RegularStepGradientDescentOptimizer; // 使用線性內插 using InterpolatorType = itk::LinearInterpolateImageFunction<ImageType, double>; // Metric using MetricType = itk::MattesMutualInformationImageToImageMetric<ImageType, ImageType>; using OptimizerScalesType = OptimizerType::ScalesType; // 多層級影像對準 using RegistrationType = itk::MultiResolutionImageRegistrationMethod<ImageType, ImageType>; // 建立 Optimizer、Interpolator、Registration、Metric、Transform 物件 OptimizerType::Pointer optimizer = OptimizerType::New(); InterpolatorType::Pointer interpolator = InterpolatorType::New(); RegistrationType::Pointer registration = RegistrationType::New(); MetricType::Pointer metric = MetricType::New(); TransformType::Pointer transform = TransformType::New(); registration->SetOptimizer(optimizer); registration->SetInterpolator(interpolator); registration->SetMetric(metric); registration->SetTransform(transform); // 讀取影像 using FixedImageReaderType = itk::ImageFileReader<ImageType>; using MovingImageReaderType = itk::ImageFileReader<ImageType>; FixedImageReaderType::Pointer fixedImageReader = FixedImageReaderType::New(); MovingImageReaderType::Pointer movingImageReader = MovingImageReaderType::New(); fixedImageReader->SetFileName(argv[1]); // 讀取固定影像 movingImageReader->SetFileName(argv[2]); // 讀取調動影像 // 設定影像來源 registration->SetFixedImage(fixedImageReader->GetOutput()); registration->SetMovingImage(movingImageReader->GetOutput()); fixedImageReader->Update(); // 設定固定影像作用範圍 registration->SetFixedImageRegion( fixedImageReader->GetOutput()->GetBufferedRegion()); // 使用 CenteredTransformInitializer 初始化轉換參數 using TransformInitializerType = itk::CenteredTransformInitializer<TransformType, ImageType, ImageType>; TransformInitializerType::Pointer initializer = TransformInitializerType::New(); initializer->SetTransform(transform); initializer->SetFixedImage(fixedImageReader->GetOutput()); initializer->SetMovingImage(movingImageReader->GetOutput()); initializer->MomentsOn(); initializer->InitializeTransform(); registration->SetInitialTransformParameters(transform->GetParameters()); // 設定各參數尺度,前 NxN 個參數為線性轉換矩陣,後 N 個參數為平移轉換參數 OptimizerScalesType optimizerScales(transform->GetNumberOfParameters()); optimizerScales[0] = 1.0; // 線性轉換矩陣 M11 optimizerScales[1] = 1.0; // 線性轉換矩陣 M12 optimizerScales[2] = 1.0; // 線性轉換矩陣 M13 optimizerScales[3] = 1.0; // 線性轉換矩陣 M21 optimizerScales[4] = 1.0; // 線性轉換矩陣 M22 optimizerScales[5] = 1.0; // 線性轉換矩陣 M23 optimizerScales[6] = 1.0; // 線性轉換矩陣 M31 optimizerScales[7] = 1.0; // 線性轉換矩陣 M32 optimizerScales[8] = 1.0; // 線性轉換矩陣 M33 optimizerScales[9] = 1.0 / 1e7; // 平移轉換參數 X optimizerScales[10] = 1.0 / 1e7; // 平移轉換參數 Y optimizerScales[11] = 1.0 / 1e7; // 平移轉換參數 Z optimizer->SetScales(optimizerScales); // MattesMutualInformationImageToImageMetric 相關參數 metric->SetNumberOfHistogramBins(128); metric->SetNumberOfSpatialSamples(50000); // 設定隨機取樣用亂數種子 metric->ReinitializeSeed(76926294); // 設定 ExplicitPDFDerivatives // UseExplicitPDFDerivatives = True // 計算速度快,耗費記憶體,適用於參數量較少的狀況,例如剛性轉換 // UseExplicitPDFDerivatives = False // 計算速度慢,節省記憶體,適用於參數量較少的狀況,例如 BSpline 轉換 metric->SetUseExplicitPDFDerivatives(true); // 設定疊代次數上限與 Relaxation Factor optimizer->SetNumberOfIterations(200); optimizer->SetRelaxationFactor(0.8); // 設定觀察影像對準過程的 Observer CommandIterationUpdate::Pointer observer = CommandIterationUpdate::New(); optimizer->AddObserver(itk::IterationEvent(), observer); // 設定在解析度變動時控制影像對準參數的 Observer using CommandType = RegistrationInterfaceCommand<RegistrationType>; CommandType::Pointer command = CommandType::New(); registration->AddObserver(itk::IterationEvent(), command); // 設定層級數 registration->SetNumberOfLevels(3); // 進行影像對準 try { registration->Update(); std::cout << "Optimizer stop condition: " << registration->GetOptimizer()->GetStopConditionDescription() << std::endl; } catch (itk::ExceptionObject & err) { std::cerr << "ExceptionObject caught !" << std::endl; std::cerr << err << std::endl; return EXIT_FAILURE; } std::cout << "Optimizer Stopping Condition = " << optimizer->GetStopCondition() << std::endl; using ParametersType = RegistrationType::ParametersType; ParametersType finalParameters = registration->GetLastTransformParameters(); double MatrixValue11 = finalParameters[0]; double MatrixValue12 = finalParameters[1]; double MatrixValue13 = finalParameters[2]; double MatrixValue21 = finalParameters[3]; double MatrixValue22 = finalParameters[4]; double MatrixValue23 = finalParameters[5]; double MatrixValue31 = finalParameters[6]; double MatrixValue32 = finalParameters[7]; double MatrixValue33 = finalParameters[8]; double TranslationAlongX = finalParameters[9]; double TranslationAlongY = finalParameters[10]; double TranslationAlongZ = finalParameters[11]; unsigned int numberOfIterations = optimizer->GetCurrentIteration(); double bestValue = optimizer->GetValue(); // 輸出影像對準結果 std::cout << std::fixed; std::cout << "Result = " << std::endl; std::cout << " Translation X = " << TranslationAlongX << std::endl; std::cout << " Translation Y = " << TranslationAlongY << std::endl; std::cout << " Translation Z = " << TranslationAlongZ << std::endl; std::cout << " Matrix = " << MatrixValue11 << " " << MatrixValue12 << " " << MatrixValue13 << std::endl; std::cout << " " << MatrixValue21 << " " << MatrixValue22 << " " << MatrixValue23 << std::endl; std::cout << " " << MatrixValue31 << " " << MatrixValue32 << " " << MatrixValue33 << std::endl; std::cout << " Iterations = " << numberOfIterations << std::endl; std::cout << " Metric value = " << bestValue << std::endl; // 建立 ResampleFilter 套用影像轉換 using ResampleFilterType = itk::ResampleImageFilter<ImageType, ImageType>; TransformType::Pointer finalTransform = TransformType::New(); finalTransform->SetParameters(finalParameters); finalTransform->SetFixedParameters(transform->GetFixedParameters()); ResampleFilterType::Pointer resample = ResampleFilterType::New(); resample->SetTransform(finalTransform); resample->SetInput(movingImageReader->GetOutput()); ImageType::Pointer fixedImage = fixedImageReader->GetOutput(); // 預設背景像素值 PixelType backgroundGrayLevel = 100; resample->SetSize(fixedImage->GetLargestPossibleRegion().GetSize()); resample->SetOutputOrigin(fixedImage->GetOrigin()); resample->SetOutputSpacing(fixedImage->GetSpacing()); resample->SetOutputDirection(fixedImage->GetDirection()); resample->SetDefaultPixelValue(backgroundGrayLevel); // 輸出影像類型 using OutputPixelType = unsigned char; using OutputImageType = itk::Image<OutputPixelType, Dimension>; // 影像轉型 CastImageFilter using CastFilterType = itk::CastImageFilter<ImageType, OutputImageType>; using WriterType = itk::ImageFileWriter<OutputImageType>; WriterType::Pointer writer = WriterType::New(); CastFilterType::Pointer caster = CastFilterType::New(); // 設定出檔案 writer->SetFileName(argv[3]); caster->SetInput(resample->GetOutput()); writer->SetInput(caster->GetOutput()); writer->Update(); // 產生棋盤式影像比較圖 using CheckerBoardFilterType = itk::CheckerBoardImageFilter<ImageType>; CheckerBoardFilterType::Pointer checker = CheckerBoardFilterType::New(); checker->SetInput1(fixedImage); checker->SetInput2(resample->GetOutput()); caster->SetInput(checker->GetOutput()); writer->SetInput(caster->GetOutput()); resample->SetDefaultPixelValue(0); // 輸出影像對準前的棋盤式影像比較圖 TransformType::Pointer identityTransform = TransformType::New(); identityTransform->SetIdentity(); resample->SetTransform(identityTransform); if (argc > 4) { writer->SetFileName(argv[4]); writer->Update(); } // 輸出影像對準後的棋盤式影像比較圖 resample->SetTransform(finalTransform); if (argc > 5) { writer->SetFileName(argv[5]); writer->Update(); } return EXIT_SUCCESS; }
編譯方式完全相同,而執行時則輸入 3D 的影像:
# 執行程式 ./MultiResReg brainweb165a10f17.mha \ brainweb1e1a10f20Rot10Tx15.mha \ output.mha checkerboard1.mha checkerboard2.mha
這裡所使用的測試影像可從 Kitware 網站上取得。
參考資料:MultiResImageRegistration1.cxx、MultiResImageRegistration2.cxx、MultiResImageRegistration3.cxx
{kind=link}